News
WPI RBE Colloquium Series Presentation

Friday, February 22, 2019
2:00 p.m. - 3:00 p.m.
60 Gateway Park, GP 1002
Research
Compositional Reinforcement Learning with Temporal Logic Constraints
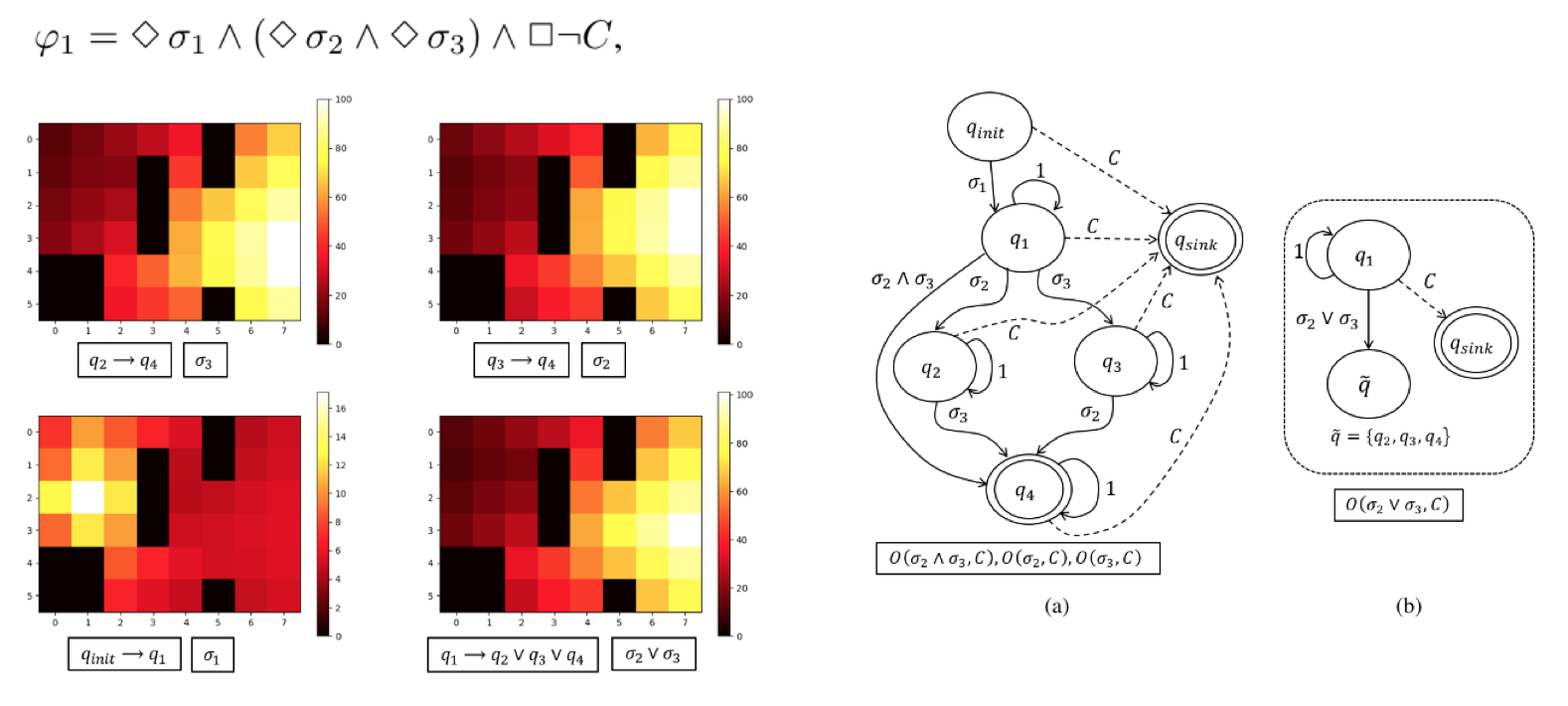
Optimal planning in Markov decision processes under temporal logic constraints is central to probabilistic model checking and synthesis. However, for complex specifications, scalability poses a main barrier for applying temporal-logic constrained planning in practical applications since the size of policy grows exponentially in the size of the specification formula. To tackle this issue, we proposed a compositional planning approach that decomposes the original temporal logic-constrained planning problem to several problems with smaller and simpler specifications. By establishing the relation between compositional reasoning in logic and composability of a class of near-optimal policies called entropy-regulated optimal policies, we develop an algorithm that is able to generate modular sub-policies under the set of simple specifications and further reuse and compose them to solve for a good initial policy under the original specification. Moreover, based on the option framework in hierarchical MDP planning, the optimal policy can be obtained efficiently via planning with both primitive actions, sub-policies, and the "compositions" (or precisely, arbitration) of sub-policies. We demonstrate the correctness and efficiency of the proposed method in several stochastic planning examples in Markov decision processes under temporal logic constraints.
For details please check the preprint paper here.
Dynamic Motor Primitives for Bipedal Walking

CHLA Human Robot Interaction Project
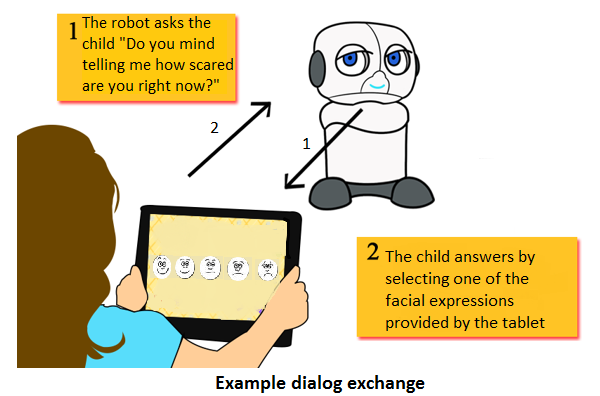
This project is a collaboration between the Interaction Lab and Children's Hospital Los Angeles (CHLA) to reduce pain and anxiety in children (aged 4-12) who are receiving an intravenous (IV) line. From the medical literature, we know that IV placement is the most common cause of pain and distress in children’s hospitals. Working with Dr. Margaret Trost and Child Life specialists at CHLA, we developed a robot buddy (the Maki robot platform: renamed “IVEY”) as a potential intervention to reduce negative outcomes.
For details please check the project page here.
An early version of implementation can be found here.
Self-balanced Single Legged Hopping Robot
Papers

Journal papers
Conference papers
2019
[1] Xuan Liu, Jie Fu, “Compositional Planning in Markov Decision Process: Temporal abstraction meets generalized logic composition”, Accepted by American Control Conference (ACC), 2019.
[2] Renato Gasoto, Miles Macklin, Xuan Liu, Yinan Sun, Kenny Erleben, Cagdas Onal, Jie Fu, “A Validated Physical Model For Real-Time Simulation of Soft Robotic Snakes”, Accepted by IEEE International Conference on Robotics and Automation (ICRA), 2019.
2015
[1] Liu, Xuan, CHENGLONG FU, and YU ZHOU. "The Key Factors for a One-Legged Robot to Keep Balance When Hopping in Place." ASSISTIVE ROBOTICS: Proceedings of the 18th International Conference on CLAWAR, 2015.
Book Chapters
Contact
Elements
Text
This is bold and this is strong. This is italic and this is emphasized.
This is superscript text and this is subscript text.
This is underlined and this is code: for (;;) { ... }. Finally, this is a link.
Heading Level 2
Heading Level 3
Heading Level 4
Heading Level 5
Heading Level 6
Blockquote
Fringilla nisl. Donec accumsan interdum nisi, quis tincidunt felis sagittis eget tempus euismod. Vestibulum ante ipsum primis in faucibus vestibulum. Blandit adipiscing eu felis iaculis volutpat ac adipiscing accumsan faucibus. Vestibulum ante ipsum primis in faucibus lorem ipsum dolor sit amet nullam adipiscing eu felis.
Preformatted
i = 0;
while (!deck.isInOrder()) {
print 'Iteration ' + i;
deck.shuffle();
i++;
}
print 'It took ' + i + ' iterations to sort the deck.';
Lists
Unordered
- Dolor pulvinar etiam.
- Sagittis adipiscing.
- Felis enim feugiat.
Alternate
- Dolor pulvinar etiam.
- Sagittis adipiscing.
- Felis enim feugiat.
Ordered
- Dolor pulvinar etiam.
- Etiam vel felis viverra.
- Felis enim feugiat.
- Dolor pulvinar etiam.
- Etiam vel felis lorem.
- Felis enim et feugiat.
Icons
Actions
Table
Default
| Name |
Description |
Price |
| Item One |
Ante turpis integer aliquet porttitor. |
29.99 |
| Item Two |
Vis ac commodo adipiscing arcu aliquet. |
19.99 |
| Item Three |
Morbi faucibus arcu accumsan lorem. |
29.99 |
| Item Four |
Vitae integer tempus condimentum. |
19.99 |
| Item Five |
Ante turpis integer aliquet porttitor. |
29.99 |
|
100.00 |
Alternate
| Name |
Description |
Price |
| Item One |
Ante turpis integer aliquet porttitor. |
29.99 |
| Item Two |
Vis ac commodo adipiscing arcu aliquet. |
19.99 |
| Item Three |
Morbi faucibus arcu accumsan lorem. |
29.99 |
| Item Four |
Vitae integer tempus condimentum. |
19.99 |
| Item Five |
Ante turpis integer aliquet porttitor. |
29.99 |
|
100.00 |
